Overview
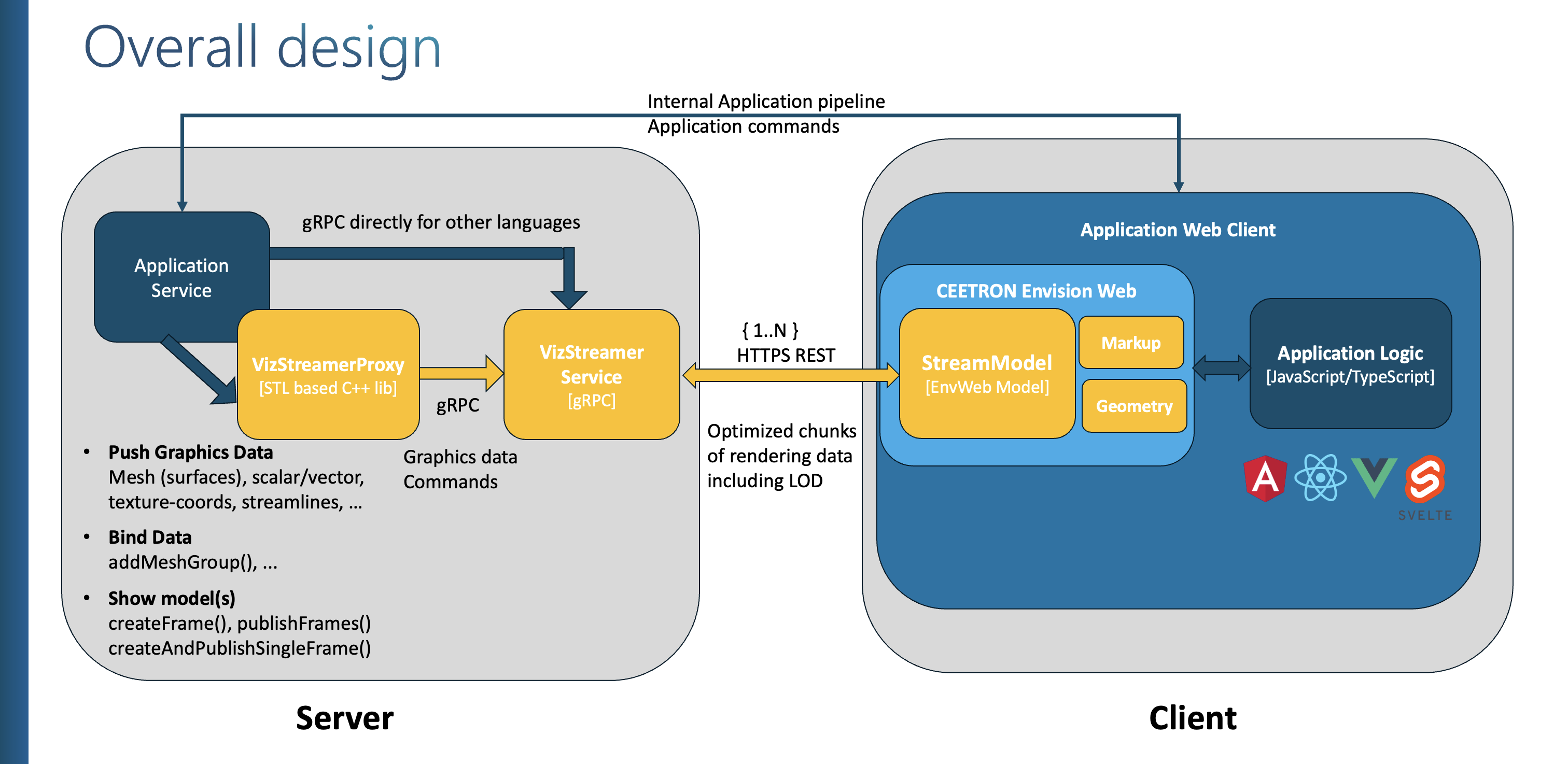
The Visualization Streamer (VizStreamer for short) is a component in CEETRON Envision Web tailored towards showing CAE visualizations in a web application with data pushed from an application/service running on the server side. It consists of several parts:
- VizStreamer Service - A server application with a gRPC interface capable of receiving CAE display data and streaming it to the Stream Model client model.
- VizStreamer Proxy - A C++ proxy (header files + static lib) to make it easy to send data from a C++ application to the VizStreamer Service.
- Stream Model - A CEETRON Envision Web client-side model capable of rendering the 3D models sent from the VizStreamer Service.
Overall design
Data Objects
The service supports the following data:
- Indexed Polygon Meshes - A group of surfaces (polygons or lines) where you provide the vertices (3d coordinates) and specify polygons with indices referencing these vertices. Any number of vertices per polygon is supported, but the polygons must be convex for proper rendering. There is an optimized method for a Mesh where all the polygons have the same number of vertices.
- Mesh Scalar Results - Scalar results that will be shown on a mesh. Per vertex, per polygon and per polygon-vertex mappings are supported. This is useful for mapping scalars onto a mesh and using the built-in result mapping features of Envision Web.
- Mesh Vector Results - Vector results that will be shown as vector arrows attached to a mesh. Per vertex, per polygon and per polygon-vertex mappings are supported. You can show any number of vectors on a given mesh.
- Mesh Displacement Results - Displacement of the vertices in a mesh. Useful for showing animations where a mesh is deformed, but not remeshed. It is more optimal as the topology of the mesh does not need to be redefined, only the displacement of the vertices.
- Point Cloud - A set of points rendered as points or vectors (if available). It can be used to show a set of vectors as you can attach a vector result to the points in the point cloud. This is useful for showing vectors that are independent of a mesh, e.g. regular sampled vectors on a cutting plane.
- Particle traces - You can specify a set of points and their time stamp to be visualized as a particle trace / streamline in the web client. The particle traces can be visualized and animated as spheres, comets and cylinders.
- Textures - You can specify a texture image and then provide per-vertex texture coordinates for each vertex in a mesh. This allows for custom texture mapping, e.g. custom scalar mapping on a mesh, or textures for more realistic visualization.
- Transforms - You can push an array of 4x4 transformation matrices and then reference this when specifying the MeshInstance. This allows for rigid body animation with minimal overhead.
- Settings - You can provide settings for Meshes, Point Clouds, Scalars, Vectors and Particle Traces. These settings specify how the various data will be rendered in the web client.
All these types of data are pushed to the service via pushXX() calls (e.g. pushIndexedPolygonMesh() (C++) or
VizStreamerService.PushIndexedPolygonMesh (gRPC)). The calls will return a ResourceKey, which identifies the
data and is used to reference the data when building up the visualization (Frame(s)) that will be rendered in the
web client.
Note
The data objects are immutable (i.e. they cannot change). Any modifications of data will require pushing a new data object.
Instances
Instances bind data and settings and, by that, define how to render the data. These instances/groups are then referenced in Frame(s) to build the scene.
There are 3 types of instances:
- MeshInstance - A mesh instance binds a Mesh (see Indexed Polygon Meshes above) with the settings for how to render the mesh. You can also bind a scalar, vector or displacement results, as well as textures/texture coordinates and transformation matrices.
- PointCloudInstance - A point cloud instance binds a PointCloud data object to a settings object that defines how to render it. It also includes optional fields for specifying scalar and vector results that are visualized on the point cloud.
- Particle Traces - Binds the particle trace data with the settings on how to visualize the particle traces.
Frames
A Frame defines all the instances/groups that should be shown in the Stream Model at any given time. A Frame is
defined by an array of ResourceKey of all the mesh instances, all the point cloud instances and all the particle
trace instances that should be rendered.
createFrame() is a server-side barrier, meaning the call will not return until the model is processed
(spatially partitioned, compressed and prepared for progressive streaming) and ready to be streamed to any client
subscribing to the stream. Note: The call will return before the model is shown in the client.
When a frame is published to the VizStreamer Service it will be shown in the model subscribing to the given stream
(see Streams below for more info). This is done with publishFrames() (C++) or VizStreamerService.PublishFrames
(gRPC). The Frames are already processed (as createFrame is a server-side barrier) so this just tells the client
models to show the given Frame(s). The client will then fetch any data not already in the client and progressively
update the rendering until it is complete. Calling publishFrames() will replace any previously published Frames,
so you need to include all Frames that should be shown.
Streams
Streams allow multiple setups/cases/configurations in one Visualization Streamer Service instance. You will need at least one stream to use the service. A web client StreamModel is always attached to (subscribes to) a Stream within a given VizStreamer Service instance.
A Frame is always attached to one Stream. However, all other data items (Data Objects, Instances) can be shared between streams (you do not push data to a stream). If two streams are sharing data, the data will only be streamed once to the web client.
Streams are useful for visualizing more than one model/setup/configuration at a given time. It can be used to compare two designs, show the model with two different results, etc.
gRPC documentation
The interface to the Visualization Streamer Service is implemented with gRPC. You can find the detailed gRPC documentation in VizStreamerService gRPC.
C++ Proxy documentation
For easy use in a C++ application, we have created a C++ proxy for the gRPC service. See the documentation in vsp::VizStreamerProxy - C++ Proxy Class for more details.

